ロボティクス:現在のセンサICが自動化の未来をどう支えているか
電動化と高精度センシングがロボット工学にどのような変革をもたらしているか
ロボット産業は、その歴史上でも最も急速な技術革新の波に直面している。
かつては安全柵の向こう側で稼働する従来の産業用ロボットが主流でしたが、今日のロボット業界には、協働ロボット、自律移動ロボット(AMR)、無人搬送車(AGV)、ヒューマノイドロボットなどが登場しています。新世代のロボットには、より高速な動作、より高度なナビゲーション、安全な協働、そして多くの場合、人間の能力を模倣することなど、さらなる能力が求められています。
この変革は、機械設計のみによってもたらされるものではなく、電動化、小型化、そしてモーションの精密制御によって推進されており、そのなかで電流センサICが決定的な役割を果たしています。
ロボット技術の拡大と厳しい性能要件が相まって、統合型電流センサ技術は、次世代のインテリジェントマシンにとって単に重要なだけでなく、不可欠なものとなっています。
拡大するロボットプラットフォームの多様性
現代のロボティクスは、もはや従来の6軸産業用ロボットだけに限定されていません。今日のロボティクス分野は、それぞれ異なる性能要件を持つ6つの主要なカテゴリーに広がっています。それらは、産業用ロボット、スカラロボット、協働ロボット、移動ロボット、AGVおよびAMR、そしてヒューマノイドです。これらのプラットフォームは、可搬重量、可動範囲、位置決め精度、環境制約、速度といった点で異なり、これらはすべて、センサの構成やパワーステージの要件を決定づける重要なパラメータとなります。
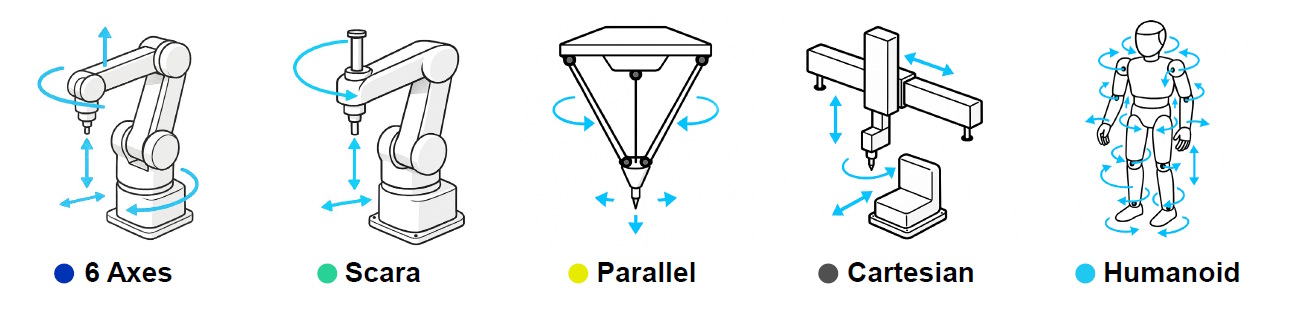
産業用6軸ロボットは、高い可搬重量、長いリーチ、そして高速な軌道精度を備えており、製造現場で最も広く普及しています。そのコントローラには、通常、大電流測定機能と安全な絶縁が求められます。
協働ロボットは、安全性とリアルタイムの電流フィードバックを最優先し、予期せぬ人間との接触に即座に対応します。
移動ロボットやAMRには、バッテリー寿命を延ばすために、コンパクトな電子機器、高効率、および低消費電力が求められます。
成長著しいヒューマノイドロボット分野では、移動能力と器用さを兼ね備えつつ、厳格な安全基準と小型化のニーズを満たすことが求められています。
この多様性は、現在の計測技術にとって多岐にわたる課題と機会をもたらしている。
ロボット工学の動向
あらゆるロボット分野において、いくつかの業界横断的なトレンドが、モーションシステムや電子機器の設計手法を一新しつつある。
第一に、ロボットの小型化・軽量化および集積度の向上が挙げられます。この小型化の圧力により、モーターや駆動装置からパワーエレクトロニクス・チェーンに至るまで、あらゆる要素に影響が及んでいます。電流センサは、特にヒューマノイドやコンパクトな産業用ロボットの関節部電子機器に直接組み込まれる場合、はるかに厳しい物理的制約の中で高い性能を発揮しなければなりません。かさばる磁気コアを排除した電流センサICは、精度を維持しつつ実装面積を削減できるため、こうした要件を満たすのに最適です。
2つ目の大きなトレンドは、エネルギー効率と熱設計の最適化の追求です。ロボットメーカーは、SiCなどのワイドバンドギャップ半導体を、最適化された制御アルゴリズムや低損失の電力経路と組み合わせて活用し、システムの効率をこれまで以上に高めるよう努めています。こうした進歩には、駆動システム全体で熱的安定性を維持し、エネルギーの浪費を防ぐために、高精度かつ低抵抗の電流センサが求められます。集積型電流センサは、導通損失を最小限に抑え、効率的な電力管理のための信頼性の高いリアルタイムフィードバックを保証することで、こうしたニーズに対応します。
最後に、特に人の近くで動作する協働ロボットやヒューマノイドにおいて、安全性と機能的完全性がエンジニアリング上の最重要課題となっています。これらのプラットフォームは厳格な機能安全基準を満たす必要があり、その結果、自動車グレードの認証を取得し、信頼性が実証されたコンポーネントへの需要が高まっています。これらの動向は、次世代の高度な自動化を支えるために、ロボットにはよりスマートで、小型かつ安全で、効率的な電流センシング技術が必要であることを明確に示しています。
ロボットアーキテクチャと電流検出の役割
ロボットのアーキテクチャを理解するには、プラットフォームが何であれ―従来の3相産業用ロボットアームであれ、単相+中性線システムであれ、あるいは新興のヒューマノイドロボットであれ―その物理的原理は変わらないという点を認識することから始まります。速度は電圧によって決まり、トルクは電流によって決まります。
そのため、正確な電流測定は、あらゆるモーションコントロールループの基礎となります。
一般的なロボットの電源・制御系には、AC電源入力、整流器およびDCリンク(通常約325 V DC)、モーターを駆動するためのDC/ACインバータ、ロジックおよび安全プロセッサを備えたコントローラ、エンコーダまたはレゾルバによるフィードバック、そして複数の関節アクチュエータが含まれます。各関節には、設計の複雑さやモーション制御に必要な精度に応じて、2~4個のセンサが必要となる場合があります。
電流センサICは、このアーキテクチャ全体に戦略的に組み込むことで、性能、安全性、および効率性の目標達成を支援することができます。
DCリンクでは、1つのセンサがモーターに供給される総エネルギーを測定することで、電力制限、トルク制御、故障検出、および全体的なエネルギー効率管理を実現します。相レベルでは、各接続点に1~3個のセンサを設置することで、磁界指向制御が可能となり、協調安全に不可欠な滑らかな軌道、精密なトルク生成、高速時の精度、および高速応答が確保されます。電流センサICは、PFC段や24V DC補助電源においても重要な役割を果たし、絶縁された安定的かつ信頼性の高い測定機能を提供することで、通信および制御用電子機器を保護します。
結局のところ、あらゆるロボットの関節やパワーステージは、高速かつ正確な電流情報に依存しています。これなしでは、ロボットは現代の産業オートメーション、移動型ロボット、あるいは次世代ヒューマノイドプラットフォームに求められる応答性、安全性、効率性を発揮することはできません。
ロボットの種類を問わず求められる要件
電流検出の要件は、ロボットの種類によって大きく異なり、それぞれの性能、安全性、および電力処理能力に関する固有の要件を反映しています。
可搬重量が70kgを超える産業用ロボットには、大電流に対応し、高速動作サイクルに必要な高帯域幅を実現し、325V DC電源リンクに対して堅牢な絶縁性を維持できるセンサが求められます。こうした高負荷システムにおいて、LEMのGXLシリーズおよびGXMシリーズは、センシングアーキテクチャにかかる電気的・機械的負荷に最適です。対照的に、70kg未満の産業用ロボットや協働ロボットは、より低い電流範囲で動作しますが、安全認証や精密なトルク制御がより重視されます。LEMのGXSシリーズのようなコンパクトで高精度なソリューションは、応答性と安全な人間と機械の相互作用が設計上の最優先事項となるこれらの環境に適しています。
5トン未満および5トン以上のAGVやAMRを含む移動プラットフォームでは、効率性とバッテリーの最適化が重視されています。これらのロボットには、稼働時間を最大化し、高密度に実装された電子機器内部の発熱を抑えるため、消費電力が最小限で超小型のセンサが求められます。GXS、GXN、GXMの各シリーズは、幅広い電流範囲にわたって効率的で低損失な検知性能を発揮し、こうしたニーズに応えています。
一方、ヒューマノイドロボットは、小型化と安全性の観点から最も要求の厳しいカテゴリーである。その関節部のアクチュエータには、極めて高精度で軽量、かつ信頼性の高いセンシング部品が求められる。メーカーが垂直統合型の自動車向け設計原則をますます採用する中、自動車グレードの認定はここで特に重要となる。TMR技術を採用した現在のセンサICが好まれているが、これらはヒューマノイドの四肢におけるミッションクリティカルなトルク制御に必要な精度、安全整合性、および小型化を実現するだろう。
これらの特徴を総合すると、統合型電流センサ技術が、重工業用機械から機敏なヒューマノイドロボットに至るまで、あらゆる主要なロボットプラットフォームを効果的にサポートできることがわかります。ただし、最適なセンサの選定は、各用途の具体的な電気的、機械的、および安全上の要件に依存し、ペイロード、アーキテクチャ、および動作環境に見合った性能を確保する必要があります。
統合型電流センサの業界標準
集積型電流センサは、現代のロボット設計における最も差し迫った課題に直接対応するため、急速に業界標準となりつつあります。この技術は、システムの設置面積、部品点数、および設計全体の複雑さを低減することで、大きなメリットをもたらします。そのコンパクトな構造により、関節レベルの電子機器へのシームレスな統合が可能であると同時に、繊細な協働操作、産業用ピック・アンド・プレース作業、および人間との安全な相互作用に不可欠な、高精度なトルク制御に必要な高い精度を実現します。
電流センサICは、高精度化や小型化に加え、安全性、効率性、コスト効率の向上にも寄与します。高速かつ信頼性の高い電気的絶縁を実現することで、ロボットが過負荷、アクチュエータのストール、予期せぬ接触などを瞬時に検知することを可能にします。これらの機能は、産業環境においても次世代ヒューマノイドロボットにおいても、極めて重要な役割を果たします。また、低一次抵抗により発熱を抑え、システム全体の効率を向上させるため、移動型ロボットやバッテリー駆動のプラットフォームにとって大きな利点となります。
最後に、統合型電流センサは、OEMが実績のあるアーキテクチャを再利用できるようにすることで、開発期間の短縮や、ロボット工学およびモビリティ分野におけるスケールメリットの活用を可能にし、コスト最適化に貢献します。
ロボティクスの未来
ロボット産業は、センシングがインテリジェントオートメーションの基盤となる時代へと進んでいる。
ヒューマノイドロボットが初期のプロトタイプ段階から実用化へと移行するにつれ、メーカー各社は自動車業界のような垂直統合へと移行しつつあり、標準化された自動車グレードの部品を用いてプラットフォーム全体を設計しています。この変化により、安全性、信頼性、製造性を考慮した際、統合型電流センサが標準的な選択肢として注目を集めています。
一方で、ロボット内部の電子機器はますます分散化が進んでおり、センシング機能、駆動用電子機器、温度監視機能が関節レベルに直接組み込まれるケースが増えています。この進化を支えるためには、コンパクトかつ高精度な電流センサICソリューションが不可欠であり、それによって各アクチュエータにおける精密なトルク制御、ローカルな意思決定、そしてより高い自律性が実現されることになります。

今後、センシング技術はあらゆるロボット分野において、安全性と効率性を左右する重要な要素となるでしょう。
人間の近くで稼働するロボットには、規制要件とユーザーの期待の両方を満たすために、耐障害性を備えた電流測定機能、冗長性、そして卓越したトルク精度が求められます。特に電力コストの上昇やサステナビリティが優先課題となる中、エネルギー効率は購入基準の最優先事項となるでしょう。したがって、集積型電流センサのような低損失・高効率なコンポーネントは、次世代の市場をリードするロボットプラットフォームの形成において中心的な役割を果たすことになります。
こうした動向が相まって、電流センサICは単なる部品としてではなく、将来のロボティクス革新を支える戦略的基盤としての位置づけを確立しつつある。
電流センサICは、ロボット工学の未来を切り拓こうとしている
ロボティクスは、技術的・商業的な拡大という新たな時代を迎えつつあります。産業用ロボットはよりスマートで効率的になり、協働ロボットは人間との安全な相互作用に一歩ずつ近づき、移動ロボットは物流のあり方を変革し、ヒューマノイドロボットは次のフロンティアとして台頭しています。これらすべての分野において、正確かつ安全で効率的な電流測定というニーズは不変のものとして存在し続けています。
LEMの統合型電流センサの製品ラインナップは拡大を続けており、低可搬重量システム向けのコンパクトなソリューションから、高精度ヒューマノイド用途向けの今後登場するTMRベースのソリューションに至るまで、あらゆるロボットファミリーを網羅しています。小型化、安全性、垂直統合というトレンドが進む中、統合型電流センサの重要性はますます高まり、このセンサ技術は未来のロボットを支える存在となるでしょう。