よくある技術的質問
一般
-
トランスデューサー選択時にはどのパラメーターを考慮する必要がありますか?
用途の全側面を考慮してください。
トランスデューサーおよびシステム設計を選択するには、特に以下に注意を払い、用途のすべての側面を考慮してください。
- 電力供給要件、ピーク測定、応答時間、di/dt、およびdv/dtなどの電気的要件。
- 開口寸法、全体寸法、質量、材料、取り付け、および振動などの機械的要件。
- 時間と比較した電流分布、最大RMS測定値、熱抵抗、および冷却などの熱条件。
- 振動、動作温度範囲、他の導体または磁界からの距離などの環境条件。
重大と考えられる要素を特定してください。
一部の用途は、より複雑性が高く、以下などの重大と考えられる複数の要素を兼ね備えています。
- 電磁干渉
- 重大なコモンモード電圧過渡現象(dv/dt)
- 機械的ストレス(振動、衝撃など)
- 特殊な絶縁要件または部分放電要件
- 特定規格への準拠など
試験を実施してください。
最適な方法は、特定のアプリケーション環境で試験を実施することです。これを行えない場合は、御社の設置図およびトランスデューサー動作条件の詳細説明(環境条件の説明、測定される波形のグラフ、誘導子や導電体など付近で障害をもたらす可能性のある要素、磁性体の存在、または他のトランスデューサーの場所など)をLEMにご提供ください。
-
「一次側定格」実効電流または実効電圧はどのように測定されますか?
「直流」または「定格電流(電圧)」とも呼ばれ、トランスデューサーが伝達可能な最大連続熱電流(電圧)です。
もう1つの定義は、連続動作中に温度が指定値を超えないよう、特定条件下でトランスデューサーを通過することが可能な最大実効電流(電圧)です。これは、50Hzの正弦波信号を使用して測定されます。
-
「測定範囲」とは何を示しますか?
測定領域は、非定常状態での最大測定可能ピーク値を限度とします。
- フラックスゲートを使用したものを含むクローズドループトランスデューサーの例:
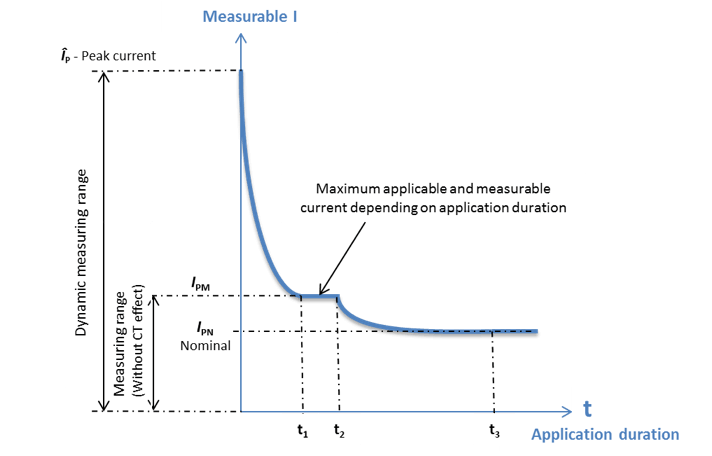 トランスデューサーは、実際には、電流の印加時間が非常に短く、非反復的な場合に、はるかに高い電流値を測定することができます。そのため、これは、ピーク電流を限度とする動的測定範囲と呼ばれます。この場合、トランスデューサーは、トランスとして動作します(トランス効果)。最大ピーク電流は、負荷(測定)抵抗、バスバー温度、およびトランスデューサーの構造により決まります。複数のパラメーターが相互作用することがあるため、動的範囲および許容時間(t1~t3)は測定されず、データシートには示されません。
トランスデューサーは、実際には、電流の印加時間が非常に短く、非反復的な場合に、はるかに高い電流値を測定することができます。そのため、これは、ピーク電流を限度とする動的測定範囲と呼ばれます。この場合、トランスデューサーは、トランスとして動作します(トランス効果)。最大ピーク電流は、負荷(測定)抵抗、バスバー温度、およびトランスデューサーの構造により決まります。複数のパラメーターが相互作用することがあるため、動的範囲および許容時間(t1~t3)は測定されず、データシートには示されません。 - オープンループホール効果トランスデューサーの場合測定範囲は、磁気回路の飽和または電圧出力段の限度と関連します。
- フラックスゲートを使用したものを含むクローズドループトランスデューサーの例:
- 測定抵抗器または負荷抵抗器(RM、RB)はどのように機能しますか?
-
測定抵抗器(RM、RB)の限度はどうなっていますか?
測定抵抗器は、安全かつ最適なトランスデューサーの動作を実現するため、規定の範囲内で使用する必要があります。
- トランスデューサーの出力電力段の熱保護のため、抵抗器の最小値が設定されます。これは、一部のトランスデューサーでは0Ωとなる場合があります(計算のため最大電源電圧を考慮します)。
- トランスデューサーの電流・電圧の測定範囲を定めるため、抵抗器の最大値が設定されます。この値は、電気飽和状態を招かない抵抗値となります。指定のものより値の大きな抵抗器を接続すると、トランスデューサーの測定範囲が縮小されます(計算のため最小電源電圧を考慮します)。
トランスデューサーのデータシート規定値の範囲外の値が必要な場合は、最寄りのテクニカルサポートまでご連絡ください。使用条件により、異なる複数の値(周囲温度、電源電圧公差、および測定対象の最大電流・最大電圧)を計算することができます。
-
変換比とは何ですか?
定格変換比Kは、定格一次電圧または定格一次電流と定格二次電圧または定格二次電流の比をいいます。クローズドループ電流トランスデューサーの場合、巻数比NP/NSは、ほぼKRの逆数となります。たとえば、巻数比1:1000は、ほぼ1000回の二次側巻数(KR = 1000)および二次電流1mAと、1Aの電流が流れる1個の1次側ターンの比率を示します。

-
消費電流ICとは何ですか?
一次側がゼロの場合の規定の電源電圧でのトランスデューサーの電子回路の最大消費電流で、二次電流ISに追加されます。このパラメーターは、電流出力を備えたトランスデューサーにのみ適用されます。
-
トランスデューサーの電源の消費電流はどのように定める必要がありますか?
クローズドループ技術を使用したトランスデューサーのみ、電源およびその限度を定義する場合に特別な注意が必要です。クローズドループ電流トランスデューサーおよびクローズドループ電圧トランスデューサーの動作原理により、消費電流ICは、一次側ゼロ時の固定部分と、測定される電流・電圧の関数(IS)である部分の2つの部分に分けることができます。2番目の部分は、以下のとおり計算することができます。
- 電流トランスデューサーの場合、IS = ピーク一次電流 × 巻数比
- 電圧トランスデューサーの場合、IS = (ピーク一次電圧/一次抵抗器) × 巻数比
-
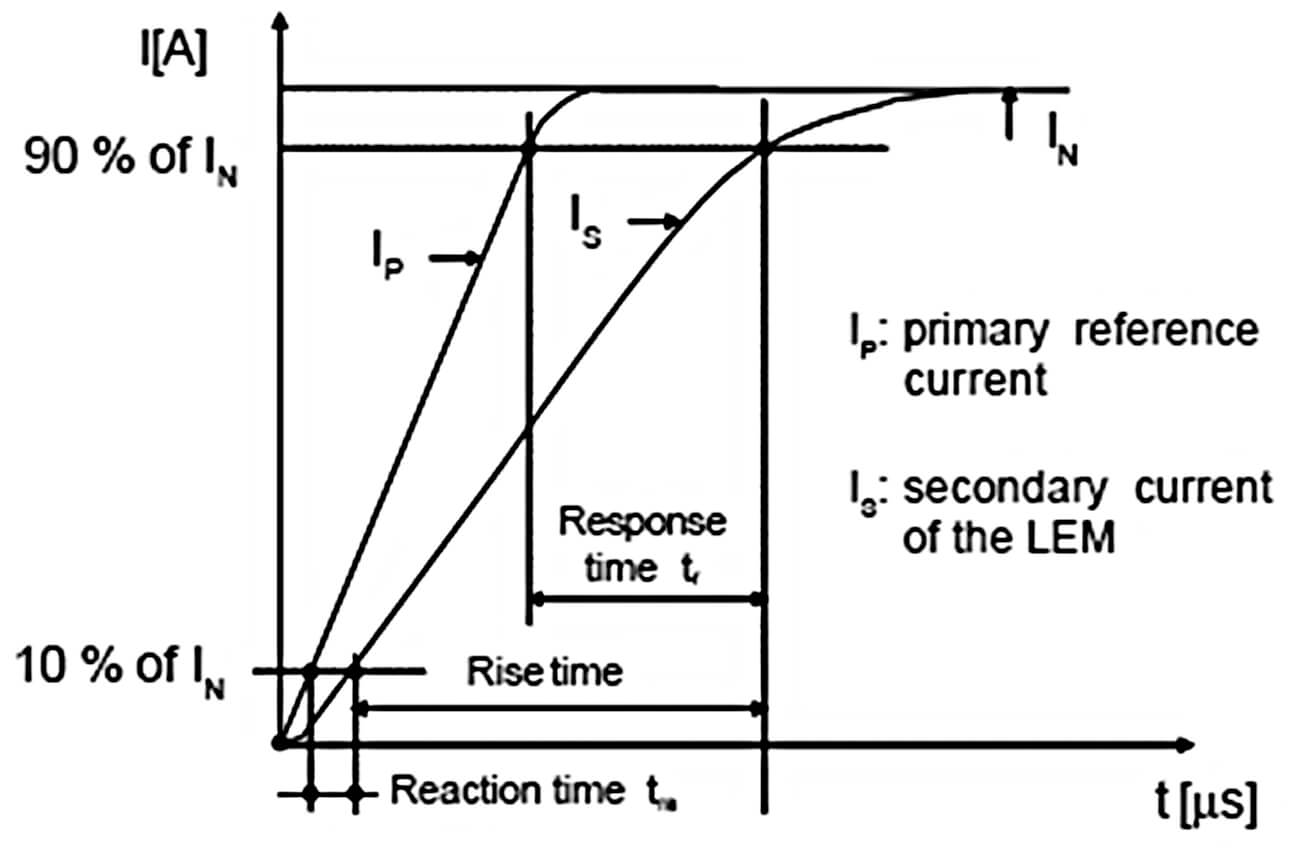
応答時間(tr)はどのように定義されますか?
トランスデューサーの動作の特徴付けに使用されるステップ応答時間は、一次電流がその最終値の90%に到達する時間とトランスデューサーの出力がその最終振幅の90%に到達する時間の差をいいます。一次電流は、任意のdi/dt傾斜(通常は100A/µs)と、定格電流値IPNに近い振幅を有する電流ステップとして動作する必要があります。
-
反応時間(tra)はどのように定義されますか?
LEMは、反応時間(tra)を、出力信号の立ち上がり時間と、IPNの総変動の10%で取得される信号の立ち上がり時間の差と定義しています。
-
「di/dtに正確に反応」とはどういう意味ですか?
トランスデューサーの動作およびその一次電流の迅速な変化に対応する能力を特徴付けるために使用される「di/dtに正確に反応」という言い回しは、応答時間がIPNの90%で1msを超えない範囲で一次電流が変動することを示します。
-
周波数帯域BWはどのように定義されますか?
周波数帯域とは、別途規定されている場合を除き、0Hzと、3dBの減衰量に対応するカットオフ周波数の間の周波数範囲をいいます。信号の振幅および位相が時間に合わせてどれだけ迅速に変化するかを測定した値です。そのため、周波数帯域が大きいほど、信号パラメーターの変動が速くなります。
3dBの減衰量は、
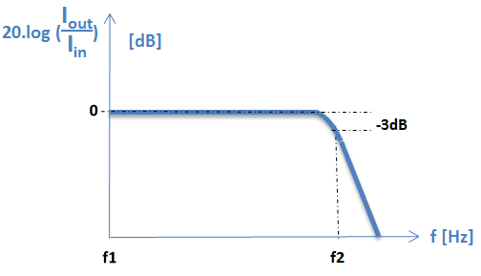
の半値またはその信号振幅の減衰値に相当します。定格電流は、コア損失による鉄心加熱により、全周波数帯で考慮することはできません。電力損を安全な水準に維持するには、動作周波数が増大する間に実効電流値を引き下げる必要があります。そのため、データシートに記載の周波数帯域は、低電流での測定結果より得られます。
-
トランスデューサーはなぜコア損失を回避できないのですか?
磁性体およびコア設計、ならびに電流振幅と周波数のスペクトル成分により、コア損失の程度が決まります。コア損失は、下図に示すヒステリシスサイクル内の線で囲んだ領域により引き起こされます。
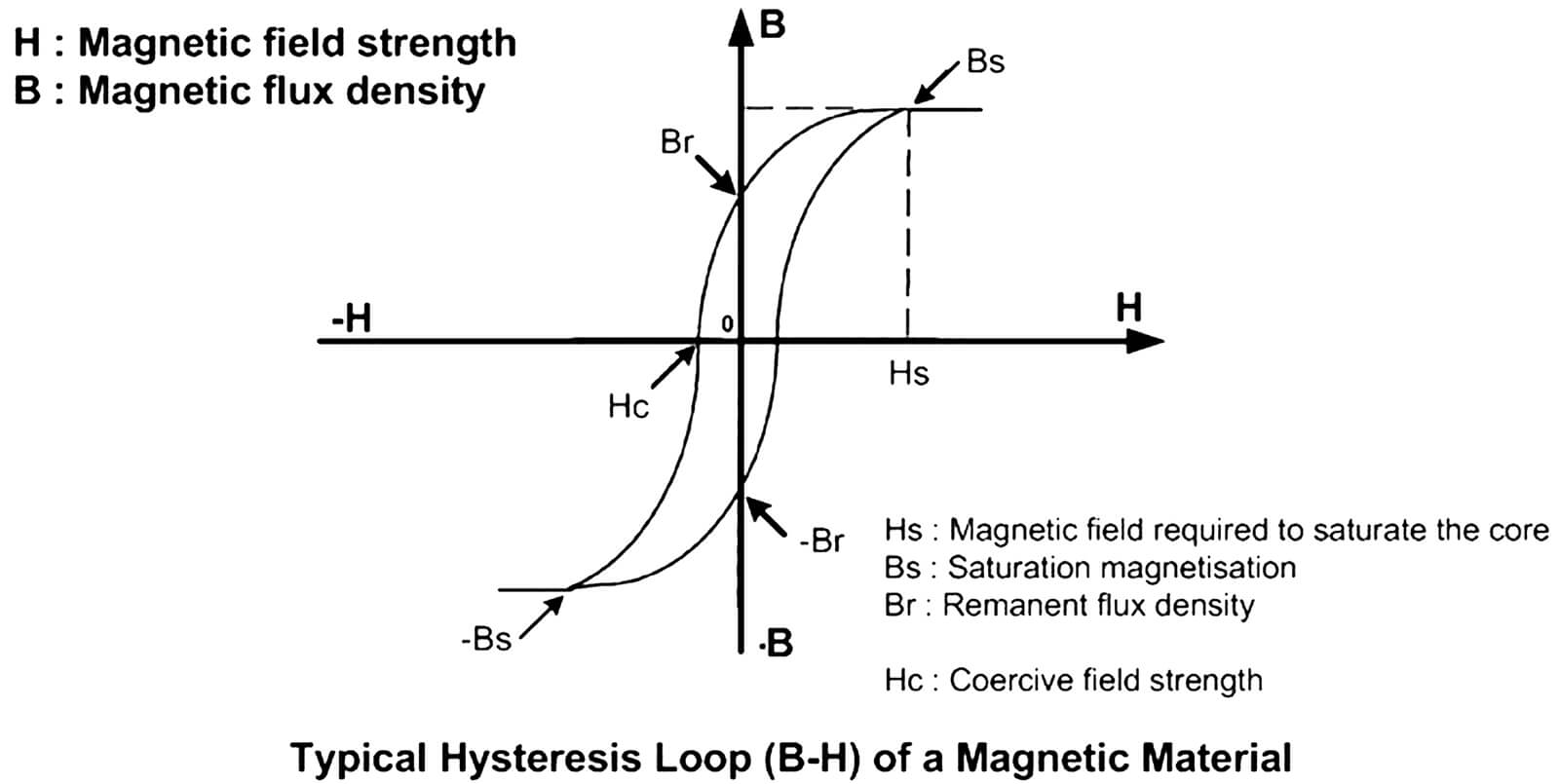
コア損失は、渦電流とヒステリシス損を組み合わせた現象です。
- 渦電流損とは、ファラデーの誘導法則により、磁界を変化させることにより物体内に誘導される電流の環である渦電流が原因となり、磁性体により吸収される電力をいいます。これらの損失は、コアのピーク磁束密度の平方根、周波数、およびコアの積層の厚さに比例します。
- ヒステリシス損とは、磁性体がサイクル状態に入っているときのエネルギー損失をいい、周波数、コアの体積、ピーク磁束密度の平方根に比例します。
周波数が大きい場合にコアが大きくなるため、これらの周波数における電流振幅を許容水準(トランスデューサーの最高温度による)に制限することが重要です。これは、低振幅信号が高周波数で許容できない水準の損失を発生させる可能性があるため、基本波電流の最大周波数だけでなく、高調波成分も制限することを意味します。
-
周波数に対する電流ディレーティングとは何ですか?
高周波数用途におけるコア損失のため、トランスデューサーの損失を一定に保つため電流を低下させる必要があります。コアの形状の複雑さ、ならびにコア損失と周波数の平方根、磁束密度の平方根、およびハウジングによる電力損の依存関係により、周波数に対する実効電流減定格の計算またはシミュレーションは、不可能ではないにしても極めて困難です。
周波数に対する実効電流のディレーティング曲線は、実効一次電流および周波数の両方を変動させてトランスデューサー内の温度測定を行い、許容最高温度を超えないことを保証することにより得ることができます。
-
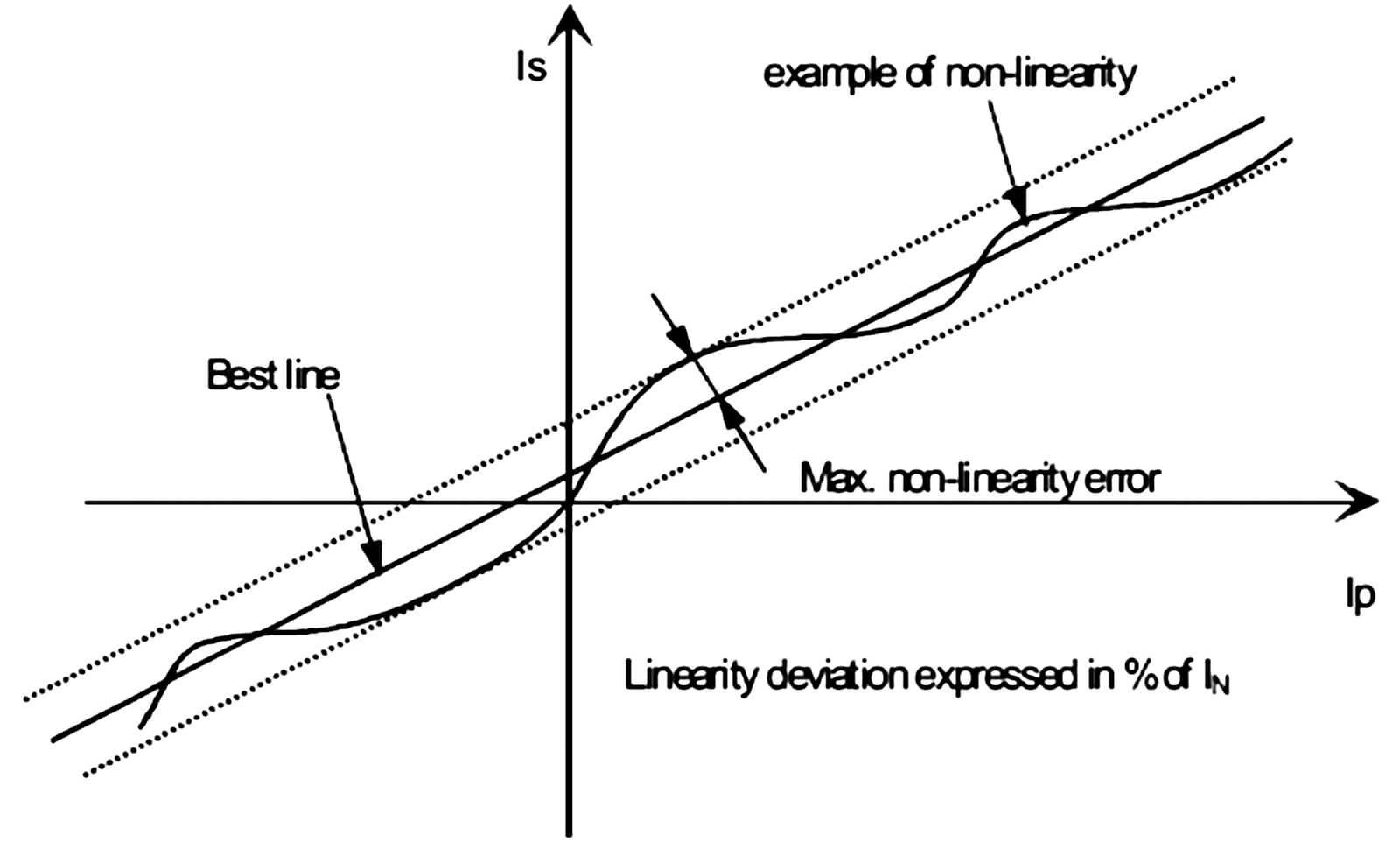
感度および直線性はどのように測定されますか?
感度および直線性を測定するため、一次電流DCが0からIPMに設定されたのち、再度–IPMから0に戻されます。
感度Gは、全電流範囲(±IPM間のサイクル)における線形回帰直線の傾きと定義されます。
直線性誤差とは、測定点と線形回帰線の間の正または負の最大差をいい、最大測定値のパーセントで表されます。
-
ASICを使用したトランスデューサーの利点は何ですか?
ASIC(特定用途向け集積回路)は、名前が示すとおり、複数の特定機能を1個のパッケージとして提供するよう設計された集積回路です。
ASICの利点は以下のとおりです。
- 全体の精度の向上
- コストの低減
- 小型化
- カスタマイズされた機能
- 妨害要素の存在する環境内での動作の向上
- 品質水準の向上(信頼性、経年変化)
-
単極電源を備えたトランスデューサーはどのように動作しますか?
LEMのクローズドループトランスデューサーの大部分は、二極電源電圧(±15 Vなど)とともに使用する仕様となっています。しかしながら、大部分のトランスデューサーは、単一方向電流の測定のため、単極電源から電力供給を受けて動作することもできます。このような場合、以下を考慮する必要があります (solution is not valid for DV and DVL family)。
- 電源電圧は、データシートに示された正電圧と負電圧の合計と等しくなる必要があります(たとえば、±15Vの製品は、+30Vで電圧供給する必要があります)。
- 測定抵抗および最大電流の選択は、トランスデューサーの出力段における過度な電力損を示すものではありません(正しい測定抵抗の評価を受けるため、ご遠慮なくLEMまでご連絡ください)。
- 出力段は、二極電源とともに使用するよう設計されており、測定オフセットを生成することなく出力バイアス電圧の最小化を実現するため、ダイオードを出力と直列に挿入する必要があります(下図を参照)。
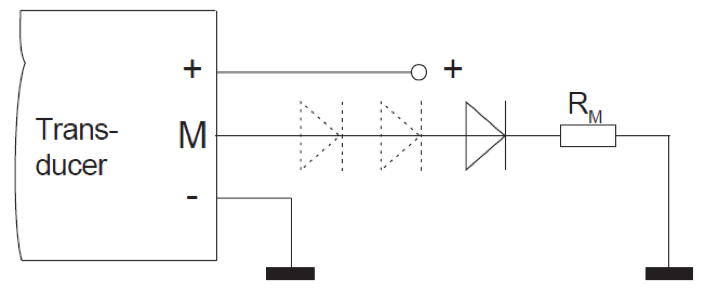
LEMのポートフォリオには、単極電源専用のトランスデューサーも含まれており、電子回路の設計および仕様は予測される動作条件を前提に定められているため、これらのトランスデューサーの使用が推奨されています。
-
電流トランスデューサーの励磁はどうすれば防げますか?
使用されるトランスデューサーおよび磁性体の種類により、鉄心の残留束(残留磁化)が「磁気オフセット」と呼ばれる別の測定オフセットを誘導します。その値は、直前のコアの励磁により決まり、磁気回路が飽和した後に最大値となります。励磁は、以下の場合に起こる可能性があります。
- 大きな過負荷電流の印加後
- 電源断(消失)
励磁により発生したオフセットは、以下の場合に消失します。
- ゆっくりと元の状態に戻る磁性体により一定時間経過後、自然に消失(これは、非常に時間のかかるプロセスです)。
- 一次電流の適切な反転または専用の消磁サイクルにより、トランスデューサーの消磁を行うことで消失。このプロセスにより、トランスデューサーは、その元の性能を回復することができます。
-
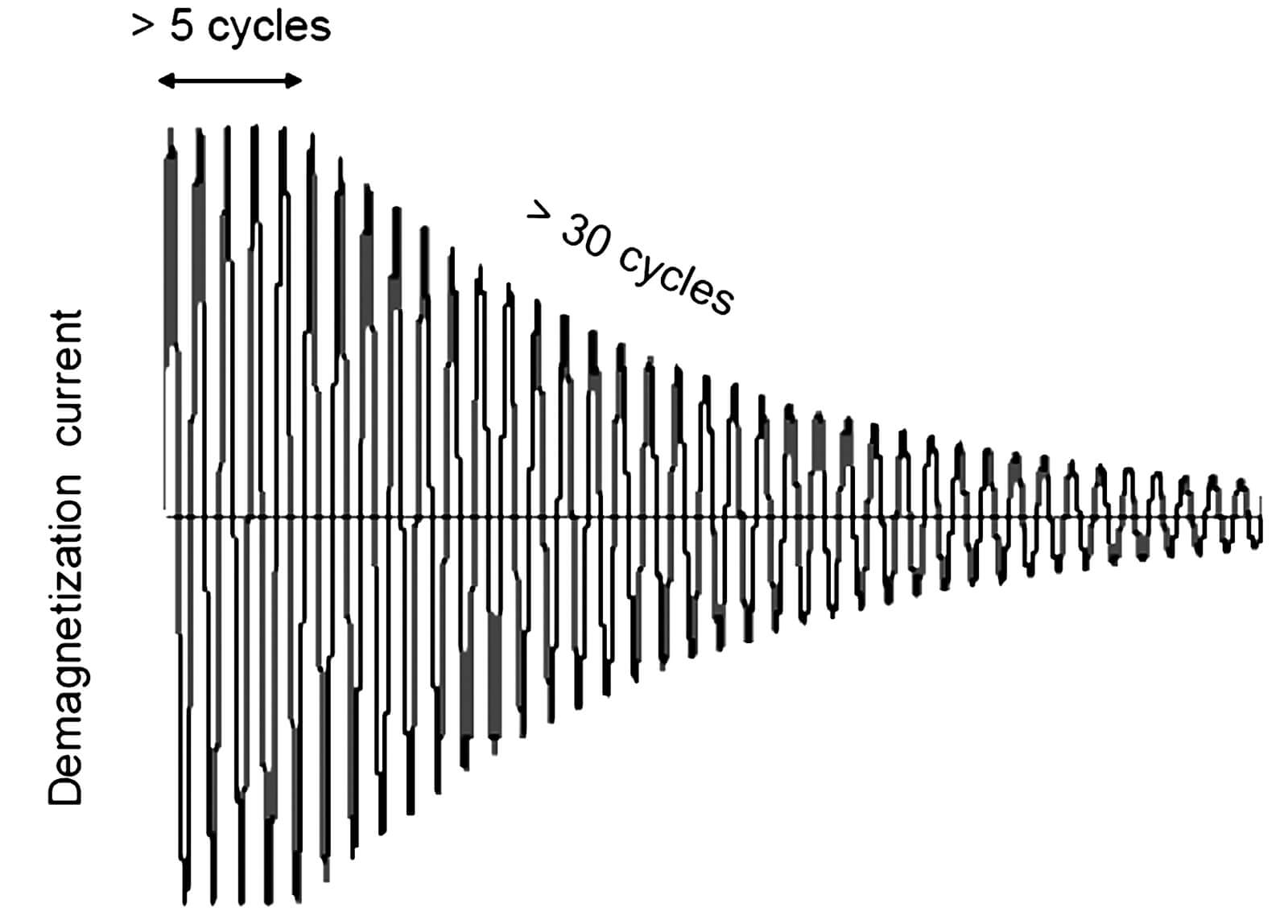
トランスデューサーは消磁することができますか?
磁気オフセットを消去するには、消磁を行う必要があります。消磁サイクルでは、低周波数AC電源を使用してB-Hループ全体を通じてコアを駆動した後、B-H動作点を原点に戻して徐々に励磁を低下させる必要があります。最低でも、全振幅で5サイクルを実施して、サイクルあたり4%以下の速度で円滑に励磁を低下させてください。これには、60Hzで30サイクルまたは500msが必要となります。
クローズドループデバイスについては、補償コイルが消磁効果を無効化しないようさらに注意を払う必要があります。または、励磁と反対の極性の適切な信号を発信することにより、コアの部分的消磁が可能です。ここで困難なことは、十分な結果を得るために正確な振幅および期間を定めることです。用途が適切に定義されている場合、経験的に必要な値を計算し、必要に応じてこの修正を適用することが可能です。
-
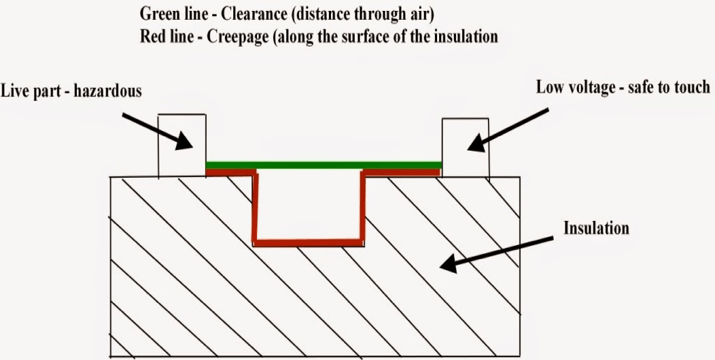
空間距離および沿面距離とは何ですか?
複数の国際標準では、電気、熱、およびエネルギーの安全に関連するオペレーターへの危険を許容可能な程度まで軽減することを主な目的として、適用範囲に含まれる設備に適用される安全要件が規定されています。
お客様の用途により、必要な電圧レベル(定格電圧、過電圧カテゴリー)、安全レベル(機能絶縁、基本絶縁、または強化絶縁)、および環境条件(汚染度)が規定されますが、トランスデューサーの設計により、絶縁体の選択(CTI)および最小絶縁距離の考慮により安全な利用を保証する必要があります。
安全標準により、性能基準に基づく設備の空間距離、沿面距離、および固体絶縁の要件が規定されています。これらの安全標準には、絶縁協調に関連する電気試験の方法も規定されています。
- 空間距離dClは、2個の導電部品間の空中の最短距離です。規定のインパルス耐電圧に耐えるよう設定する必要があります。海抜2000m以上で使用する場合は、インパルス耐電圧を保証するため、空間距離に補正係数を掛ける必要があります。
- 沿面距離dCpは、2個の導電部品間の固体絶縁材の表面に沿った最短距離です。絶縁面沿いのトラッキングによる故障を防ぐようこの距離を設定し、以下を考慮する必要があります。
- 使用システムの汚染度
- 絶縁材のCTI
沿面距離は、空間距離以上に設定する必要があります。
-
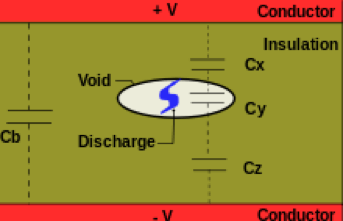
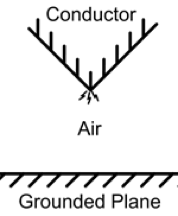
部分放電現象とは何ですか?
部分放電とは、間隙内に発生することの多い絶縁領域の一部で生じる放電です。
間隙内の小さなアーク放電により生じる高温および紫外線放射の結果として、絶縁層が劣化します。徐々に小さな孔が増え、これらの穴の内部でアークが生じ始めます。最終的には、トランスデューサーの一次部品と二次部品の間で完全な絶縁破壊が起こります。
絶縁劣化部分の増大に数年かかる可能性がある場合でも、この最終段階には、1回または複数回の通電期間だけで到達します。
部分放電試験の目的は、LEMのトランスデューサーの長期間使用を保証することです。固体絶縁(ポッティングおよびハウジング)が長期的に以下の大きな電圧応力に耐えることを保証します。
- 繰り返しピーク電圧
- 最大の定常状態電圧
- 長期的な一次過電圧
LEMのデータシートでは、10pCレベルでの部分放電消滅電圧Ue(旧データシート)または部分放電試験電圧Ut(最新製品)の値を示しています。
試験の結果は、バスバー(一次導体)の形状およびトランスデューサーの開口部内の母線の位置に強く依存します。
- 角度を付けたり、鋭利な形状の母線を用いたりしないことをおすすめします(コロナ放電発生のリスクが生じます)。
- 母線は、開口部内で中央に寄せる必要があります。
- 母線の寸法:
- 初期設定では、LEMでの試験は、想定される最悪のケースである開口部(内部チューブとの接点)を埋める母線で行われます。
- 特定の母線の寸法は、お客様から要求していただくこともできます。母線の寸法および位置をUt値とともに指定する必要があります。