技术问题问答
常用
-
传感器选型时必须考虑哪些参数?
考虑到应用中的每个条件
在传感器选型和系统设计中,所有条件都需要考虑到,尤其是以下几点:
- 电气要求,包括供电电源,测量峰值,响应时间 等di/dt and dv/dt.
- 机械要求,包括穿孔尺寸,体积,重量,材料,安装和振动等
- 温度条件,包括电流的波形与时间的关系,电流最大有效值,热阻和冷却条件。
- 环境条件,包括振动要求,工作温度范围,邻近的其他导体或磁场。
确认可能的关键条件
某些应用场合极为复杂,需考虑多种可能的要求,例如:
- 电磁影响
- 明显的暂态共模电压 (dv/dt)
- 机械扰动(振动,冲击等)
- 特殊的绝缘或局放要求
- 要求符合特殊标准等
实际测试
很显然,最佳方案是在特定的应用环境下进行实际测试。如果无法实现,请提供给LEM您的安装简图和详细的传感器工作条件(如具体的环境条件,被测波形,附近可能存在的干扰源如电感、载流导体、磁性材料或者其他的传感器)
-
原边额定电流或电压的有效值怎样确定?
有时也可称为“连续的或额定的”电流(电压),它指的是传感器能够长时间耐受的电流(电压)
另一个定义是:在一定条件下流过传感器的最大电流(电压)有效值,传感器持续工作状态下其温度而不超过限定值。这可以用标准的50H正弦信号测试。
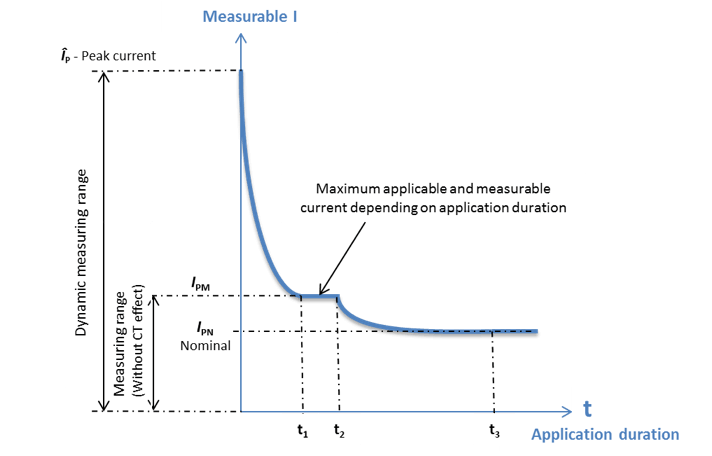
- “测量范围”如何界定?
- 测量电阻或负载电阻(RM,RB)起到什么作用?
-
测量电阻(RM, RB)为何会有限制值?
测量电阻必须在规定的范围内,传感器才能安全有效地工作。
- 最小电阻设定值是为了对传感器进行输出功率热保护。某些传感器的最小电阻值允许设置为0Ω(计算时要考虑最大电源电压)
- 最大电阻设定值决定了传感器允许的电流/电压输出范围。传感器此时输出不会电饱和。测量阻值太大将会减小传感器的测量范围(计算时以最小电源电压考虑)。
如果测量值超出了传感器的规格书上指定的范围,请联系我们的技术支持。根据您的应用条件(环境温、电源电压公差和最大电流/电压)来计算出相应的电阻值。
-
什么是变比?
额定变比K是原边额定电压或电流与输出的额定电压或电流的比值。 对于闭环传感器而言,变比NP/NS 约为匝数Kr的倒数 KR 例如,变比为1:1000对应着二次线圈匝数(KR = 1000) ,单匝原边电流为1A时二次输出电流就是1mA。

-
什么是损耗电流Ic?
它指的电源输出的最大电流,即原边测量电流或电压为零时电流传感器本身的最大电流损耗与不同测量电流对应的输出电流之和。IS .此参数仅适用于电流输出型的传感器。
-
传感器的电源应该如何选择?
闭环传感器在选取供电电源时,需要特别注意。基于闭环原理的电流或者电压传感器,其电流损耗IC 可分为两部分,一部分是传感器内部固定损耗,另一部分是被测电流或电压导致的输出损耗。(IS).第二部分可计算如下:
- 对于电流传感器:IS输出电流=原边峰值电流×变比
- 对于电压传感器: IS 输出电流=(原边峰值电压/原边电阻)×变比
-
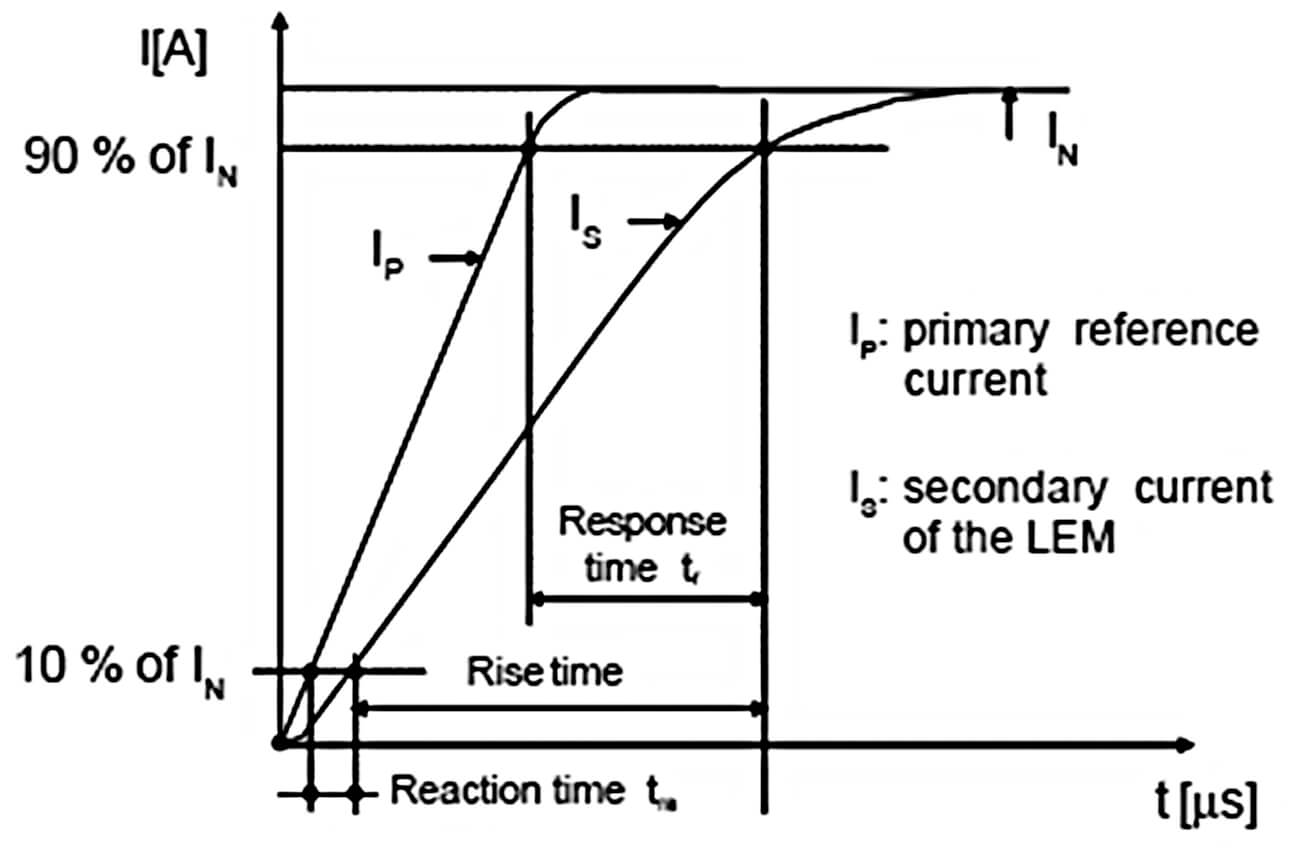
如何定义响应时间(TR)?
这个值用于表征传感器的的动态特性。响应时间指的是从原边电流达到其最大值的90%开始到传感器的输出达到其最大值的90%结束的时间间隔。原边电流阶跃信号的斜率为给定值(通常为100A/µs),幅值接近额定电流 IPN .
-
反应时间如何定义?
LEM将反应时间Tra定义为被测信号和输出信号均上升至总变化量的10%时的时间间隔。 IPN .
-
“di/dt精确跟随”是什么意思?
该值用于表征传感器的动态跟随被测电流快速变化的能力,“di/dt精确跟随”是指对被测电流变化到90%时,响应时间不超过1毫秒。 IPN.
-
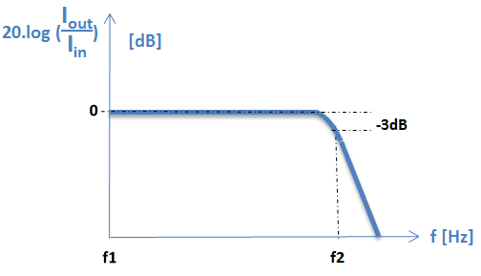
频率带宽BW是如何定义的?
频带宽度是指信号频率从0Hz到衰减-3dB对应的截止频率之间频带范围,除非另有规定。它是被测信号的振幅和相位随时间变化的速度。因此,带宽越大,信号参数的变化就越快。
衰减到-3dB意味着对应的信号功率或幅值衰减到一半
由于磁损耗导致磁芯发热,所以不能在整个频率范围内考虑额定电流。为确保功耗在安全范围,当信号频率增加时相应的RMS电流值就要减少。因此,在数据表中给出的频率带宽是在小信号下测量得到的。
-
为什么传感器会有磁芯损耗?
磁芯设计和电流的幅值和频率特性决定了磁芯损耗的水平。磁损主要是由磁滞回线中的封闭区域引起,如下图。
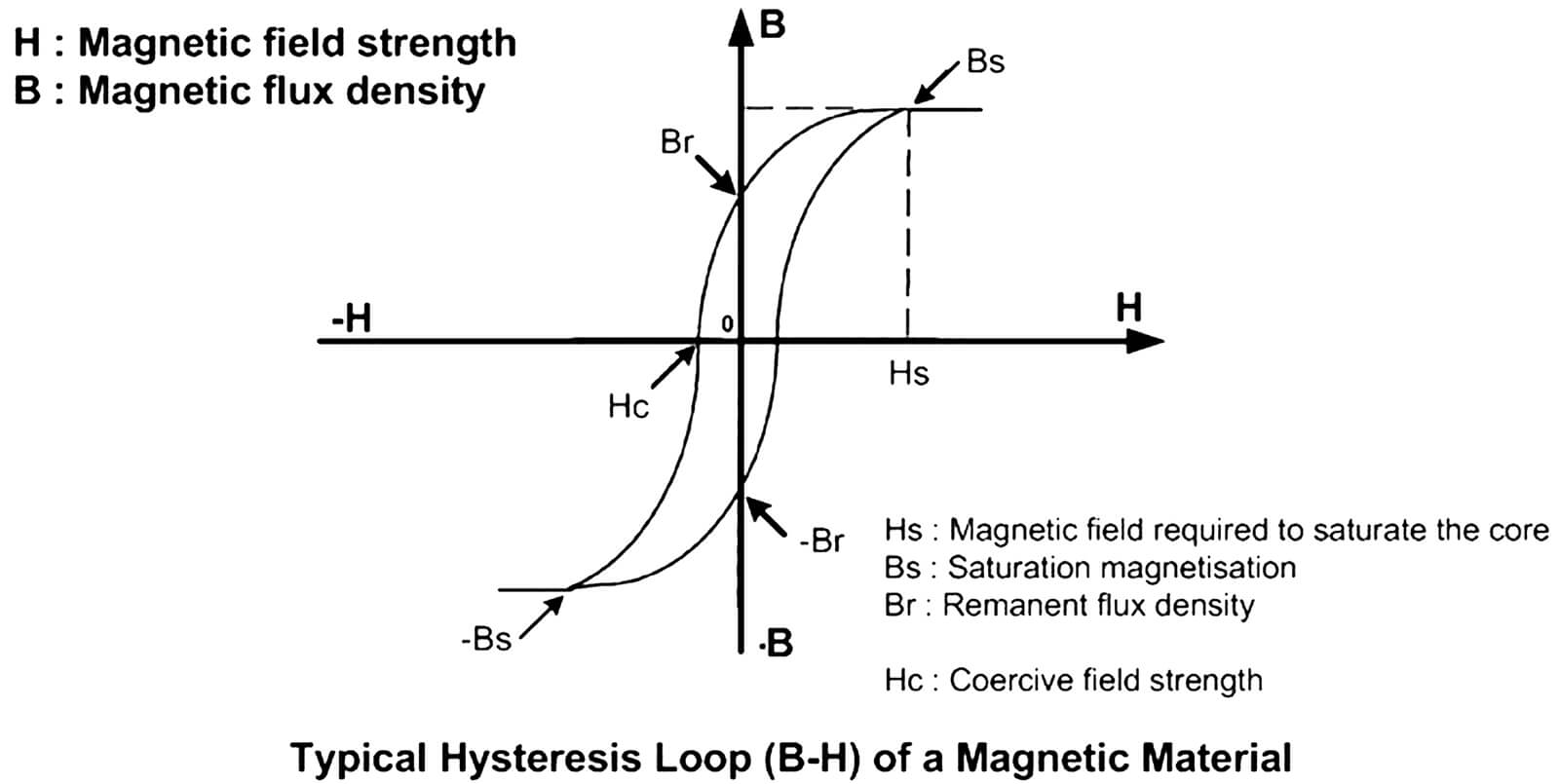
磁损 由 涡流损耗 和磁滞损耗组成.
- The 涡流损耗s是指由涡流带来的磁场能量的损耗.涡流主要是指 由交变磁场 引起的 环流 , 这是由 法拉第电磁定律决定的。. 这些损耗与铁芯的磁通密度峰值、铁芯的频率和叠片厚度成正比。
- 而 磁滞损耗 .是磁性材料在反复磁化过程中因磁滞现象而消耗的能量,与频率、磁芯体积和磁通密度的平方成正比关系。
在高频条件下,磁芯损耗是限制该频率下电流幅值的重要因素(决定传感器的温升)。这也就意味着不仅仅要限制基波电流的最大频率,还要包括谐波分量,因为即使是低振幅的小信号也有可能造成很大能量损耗。
-
什么是电流降额曲线?
高频电流应用下的传感器的磁芯损耗较大,为保证传感器损耗不变,需要降低额定电流。但由于磁芯几何形状的复杂性,磁芯损耗与频率平方、磁通密度平方的函数关系,以及壳体的功率耗散问题,尽管计算和仿真电流有效值与频率的降额曲线不是不可能,但确实非常困难。
改变原边电流有效值和频率,并保证不超过最大允许温度,可以在传感器内部进行温度测量,从而得到RMS电流与频率的降额曲线。
-
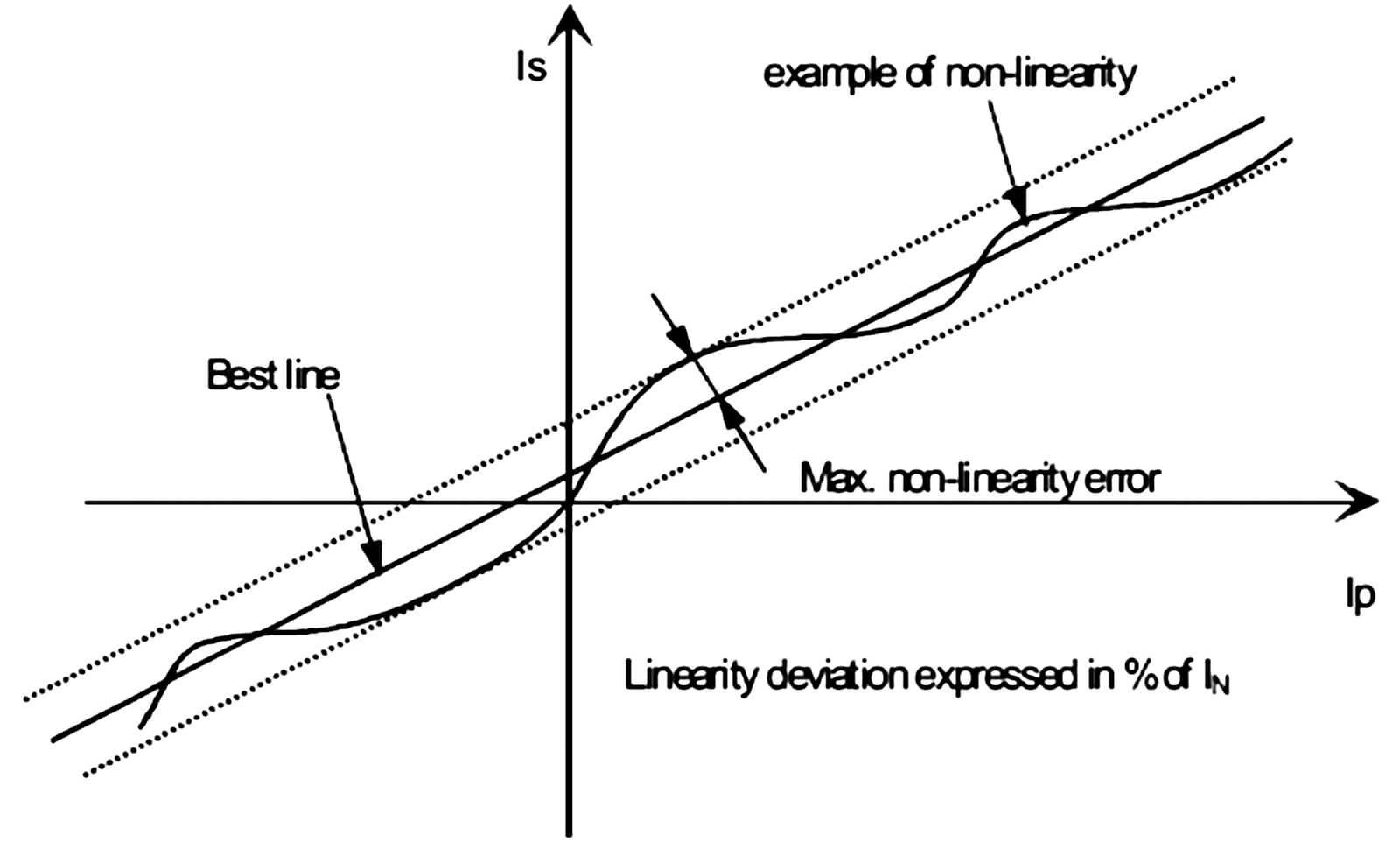
如何测量灵敏度和线性度?
.测量灵敏度和线性度时,原边直流电流从0循环到 IPM 然后到IPM再回到0。
灵敏度 G 定义为在整个电流范围内线性回归线的斜率(在整个 ±IPM循环内).
线性误差是最大的正向或负向测量点与线性回归线之间的差值,以占测量值的最大百分比来表示。
-
使用ASIC集成芯片技术的传感器有什么优点?
ASIC(专用集成电路)顾名思义,是一种集成电路,可提供多个特定功能。
它的优势:
- 提升整体精度
- 降低成本
- 减小体积
- 功能定制
- 抗外部干扰性强
- 提升质量水平(可靠性、老化等)
-
只有单电源供电时传感器是如何工作?
绝大多数的闭环传感器是需要使用用于双极性电源的(例如±15V)。然而,如果只测量单向电流,很多传感器也可以工作在单极性电源下。此时,必须考虑以下几点 (solution is not valid for DV and DVL family):
- 电源电压应等于规格书中标示的正电压和负电压之和(例如±15 V的传感器应使用﹢30V电源)。
- 测量电阻和最大工作电流的选择不能使传感器输出功耗过大(请联系莱姆以获得正确的测量电阻取值范围)。
- 输出级的设计是用于双极性电源条件下,输出端必须串联二极管来实现最小的输出偏置电压,而不是产生一个零点偏移(见下图)。
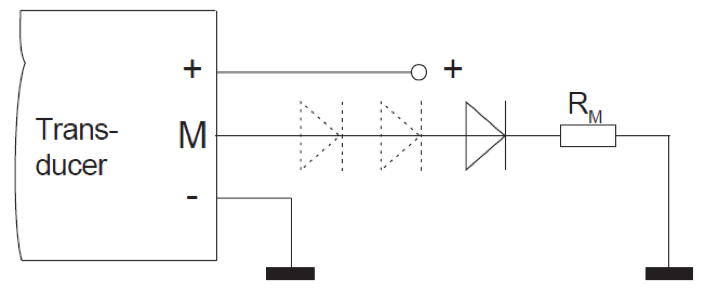
LEM产品线中有一些专门工作于于单极性电源的传感器,建议在合适工作条件下首选进行电子设计。
-
如何避免电流传感器被磁化?
根据传感器的类型和所使用的磁性材料,磁芯的剩余磁通(剩磁)引起的额外的测量偏移,称为“磁偏置”。它的值取决于磁芯的磁化强度,以及磁路饱和后达到最大值。磁化可能发生在:
- 大电流过载后
- 由于供电电源中断(或欠压)
由磁化引起的磁偏置将会慢慢消除,
- 自然状态下,根据不同的磁性材料会慢慢恢复(这是一个非常缓慢的过程)。
- 通过对传感器进行消磁,或者在原边通入过合适的与原边电流极性相反的电流,或者专用的的消磁循环,也可以恢复其初始性能。
-
传感器能消磁吗?
消除磁偏置需要进行消磁。消磁周期内要通过一个低频交流源使磁芯通过整个B-H磁滞回线,然后逐渐减少励磁,使B-H工作点回到原点。最少需要在满量程下的5个周期,然后逐渐地减少激励,每个周期的降低幅度不超过4%,在60Hz下需要30个周期或500毫秒。
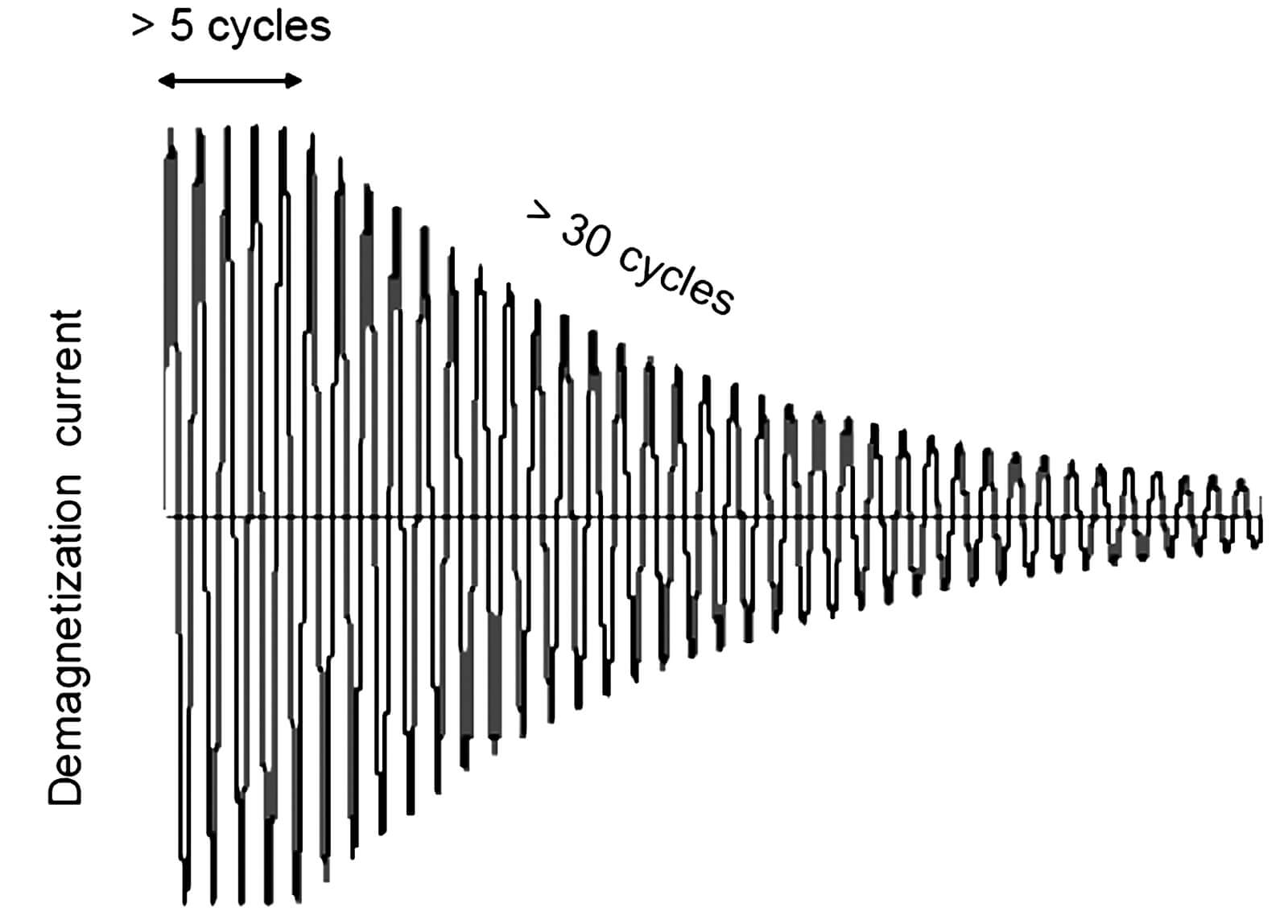
对于闭环传感器,必须需要另外一个线圈,以保证补偿线圈不抵消消磁效果。或者,通过提供适当的相反极性的信号,可以实现磁芯的部分消磁。这么做的困难在于确定准确的幅值和持续时间以获得满意的结果。如有一个定义好的应用程序,可根据经验确定所需的值,并在必要时进行修正。
-
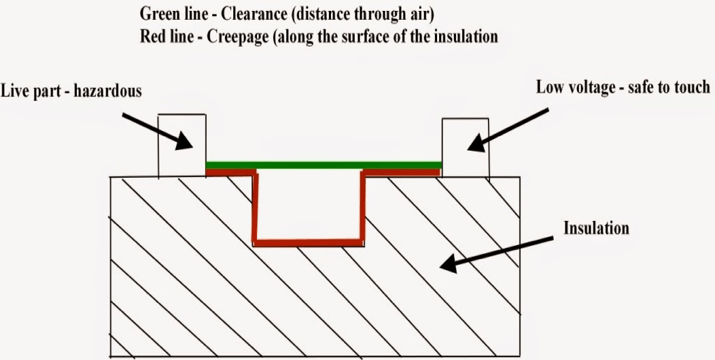
什么是电间隙和爬电距离?
若干国际标准规定了适用于其范围内的设备的安全要求,其主要目的是确保设备对使用者在电气、热量和能源安全方面的危害降低到可接受的范围内。
客户的实际应用决定了所需的电压(额定电压,过电压类别)、安全水平(功能绝缘、基本绝缘或加强绝缘)和环境条件(污染度),而传感器的设计应确保绝缘材料材质(CTI)和最小绝缘距离能够满足要求。
安全标准是根据设备的性能要求来规定设备的带电间隙、爬电距离和固体绝缘要求。其中也包括与绝缘相关的电气测试方法。
- 带电间隙DCL 是两个导电部分间空气中的最短距离它决定了产品能承受的冲击耐压。工作海拔超过2000m以上,带电间隙应乘以修正系数,以确保合理的耐压水平。
- 爬电距离dCp 是在两个导电部件之间沿固体绝缘材料表面的最短距离。 尺寸应避免表面爬电引起的绝缘失效,应考虑:
- 应用系统的污染等级。
- 绝缘材料的CTI
爬电距离大于或等于间隙。
-
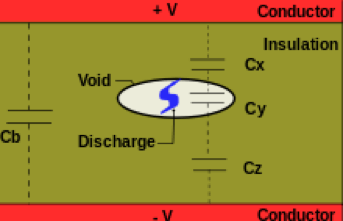
如何解释局部放电现象?
局部放电是发生在部分绝缘部位的放电,经常是在空隙中。
由于绝缘间隙内的小电弧产生的高温和紫外线辐射,绝缘层会被降解。慢慢地,这些间隙内的小孔穴逐渐增多,慢慢形成弧形。最终传感器的初级和次级之间的绝缘完全破坏。
如果绝缘内的间隙增长持续好几年,最终的绝缘破坏却只需要一个或多个电气周期。
局部放电试验的目的是确保LEM传感器的产品寿命。这就保证了固体绝缘(灌封+外壳)所承受的电压应力,从长远来看:
- recurring peak voltage重复峰值电压
- 最高稳态电压
- 长期的暂态过压
在LEM产品规格书内,我们将标明局部放电熄灭电压UE的值在10pc水平(旧版规格书)或局部放电试验电压Ut(新产品)。
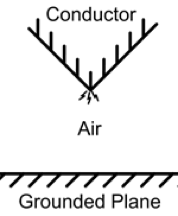
- 我们建议一定避免出现尖锐的形状(否则可能出现电晕放电的危险)。
- 原边导体位于孔径中心
- 原边导体尺寸:
- 在LEM内部的常规测试是以最坏的情况也就是原边导体完全充满孔径(与内径表面接触)进行测试的。
- 特定的原边导体尺寸也可以由用户要求:原边道题尺寸和孔中的位置符合对应的UT值。