Robotics: How Current Sensor IC Are Powering the Future of Automation
How Electrification and Precision Sensing Are Transforming Robotics
The robotics industry is undergoing one of the fastest technological accelerations in its history.
Once dominated by classic industrial arms working behind safety cages, today’s landscape includes collaborative robots, autonomous mobile robots (AMRs), automated guided vehicles (AGVs), and humanoid robots. Each new generation of robot is expected to do more: operate faster, navigate smarter, collaborate safely, and in many cases, mimic human capabilities.
This transformation is not driven by mechanical design alone, it is powered by electrification, miniaturization, and the precision control of motion, where Current Sensors IC plays a decisive role.
The combination of robotics expansion and stringent performance requirements makes Integrated Current Sensors technology not only relevant but critical to the next era of intelligent machines.
The Expanding Spectrum of Robotic Platforms
Modern robotics is no longer limited to traditional 6‑axis industrial robots. Today’s landscape spans six major families, each with distinct performance requirements: industrial robots, SCARA systems, collaborative robots, mobile robots, AGVs and AMRs, and humanoids. These platforms differ by payload, reach, repeatability, environmental constraints, and speed, all key parameters that determine sensor architecture and power‑stage requirements.
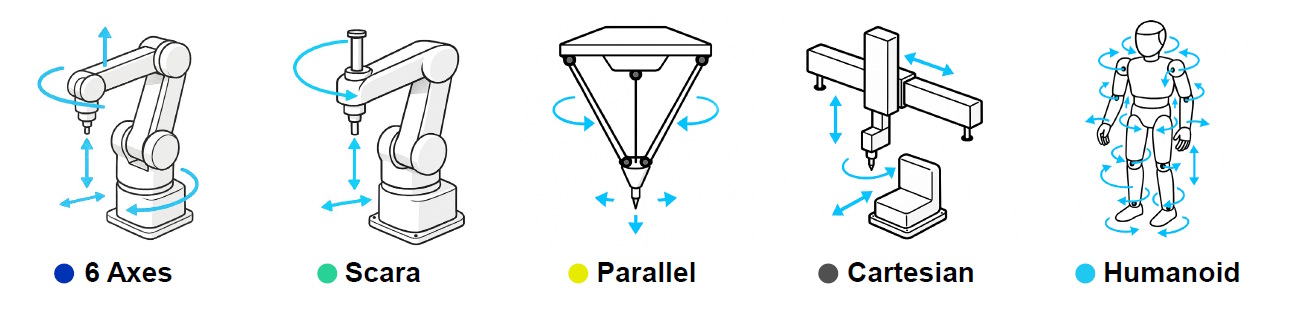
Industrial 6‑axis robots offer high payload capacity, long reach, and high-speed path accuracy, making them the most common in manufacturing environments. Their controllers typically require high-current measurement capability and safe isolation.
Collaborative robots prioritize safety and real-time current feedback to react instantly to unexpected human interaction.
Mobile robots and AMRs need compact electronics, high efficiency, and low power consumption to preserve battery life.
Humanoid robots, a growing segment, blend mobility and dexterity with stringent safety and miniaturization needs.
This diversity creates a broad set of sensing challenges and opportunities for current measurement technology.
The Trends in Robotics
Across all robot families, several cross‑industry trends are reshaping how motion systems and electronics are designed.
The first is downsizing and miniaturization, as robots become smaller, lighter, and more densely integrated. This scaling pressure affects everything, from motors and drives to the power electronics chain. Current sensors must deliver high performance within much tighter physical constraints, especially when embedded directly into joint‑level electronics for humanoids or compact industrial robots. Current Sensor ICs, which eliminate bulky magnetic cores, are naturally suited to meet these requirements by reducing footprint while maintaining precision.
A second major trend is the pursuit of energy efficiency and thermal optimization. Robotics manufacturers are increasingly leveraging wide‑bandgap semiconductors such as SiC, along with optimized control algorithms and low‑loss power paths, to push system efficiency higher than ever. These advances require current sensors that offer high accuracy and low resistance to maintain thermal stability and prevent energy waste across the drive system. Integrated Current Sensors support these needs by minimizing conduction losses and ensuring reliable, real‑time feedback for efficient power management.
Finally, safety and functional integrity have become central engineering priorities, particularly for collaborative robots and humanoids that operate near people. These platforms must meet stringent functional safety standards, driving demand for components with automotive‑grade qualification and proven reliability. Together, these trends point in a clear direction, robots need current sensing that is smarter, smaller, safer, and more efficient to support the next generation of advanced automation.
Robot Architecture & The Role of Current Sensing
Understanding robot architecture begins with recognizing that, regardless of platform, whether traditional 3‑phase industrial arms, 1‑phase + neutral systems, or emerging humanoids, the core physics remain the same. Speed is governed by voltage, and torque is governed by current.
For that reason, accurate current measurement is foundational to every motion‑control loop.
A typical robot power and control chain includes the AC grid input, rectifier and DC link, commonly around 325 V DC, a DC/AC inverter to drive the motor, a controller with logic and safety processors, encoder or resolver feedback, and multiple joint actuators. Each joint may require two to four sensors depending on design complexity and the precision required for motion control.
Current Sensor ICs can be strategically embedded throughout this architecture to support performance, safety, and efficiency goals.
On the DC link, a single sensor measures the total energy feeding the motor, enabling power limitation, torque control, fault detection, and overall energy‑efficiency management. At the phase level, one to three sensors per joint allow field‑oriented control, ensuring smooth trajectories, precise torque generation, high‑speed accuracy, and fast reaction times essential for collaborative safety. Current sensor ICs also serve critical roles in PFC stages and 24 V DC auxiliary supplies, providing isolated, stable, and reliable measurement that protects communication and control electronics.
Ultimately, every robotic joint and every power stage depends on fast, accurate current information. Without it, robots cannot achieve the responsiveness, safety, or efficiency required by modern industrial automation, mobile robotics, or next‑generation humanoid platforms.
Application Requirements Across Robot Types
Current sensing requirements vary significantly across robot families, reflecting their unique performance, safety, and power‑handling demands.
Industrial robots with payloads above 70 kg require sensors capable of handling high current levels, delivering high bandwidth for rapid motion cycles, and maintaining robust isolation for 325 V DC power links. For these heavy‑duty systems, LEM’s GXL and GXM Series align well with the electrical and mechanical stresses placed on the sensing architecture. In contrast, industrial and collaborative robots under 70 kg operate at lower current ranges but place greater emphasis on safety certifications and precision torque control. Compact, high‑accuracy solutions like LEM’s GXS Series are better suited for these environments, where responsiveness and safe human‑machine interaction are critical design priorities.
Mobile platforms, including AGVs and AMRs below and above 5 t, shift the focus toward efficiency and battery optimization. These robots require ultra‑compact sensors with minimal power dissipation to maximize runtime and reduce heat generation inside tightly packaged electronics. The GXS, GXN, and GXM Series all meet these needs by providing efficient, low‑loss sensing performance across a wide current range.
Meanwhile, humanoid robots represent the most demanding category from a miniaturization and safety standpoint. Their joint‑level actuators require exceptionally accurate, lightweight, and highly reliable sensing components. Automotive‑grade qualification becomes especially important here, as manufacturers increasingly adopt vertically integrated, automotive‑style design principles. Current Sensor ICs with TMR technology are preferred and will deliver the precision, safety integrity, and compactness needed for mission‑critical torque control in humanoid limbs.
Together, these distinctions highlight how Integrated Current Sensors technology can effectively support every major robot platform, from heavy industrial machinery to agile humanoids. However, the optimal sensor choice depends on the specific electrical, mechanical, and safety requirements of each application, ensuring performance is matched to payload, architecture, and operating environment.
The Integrated Current Sensors Industry Standard
Integrated Current Sensors are rapidly becoming the industry standard because they directly address the most pressing challenges in modern robot design. This technology offers compelling advantages by reducing system footprint, bill‑of‑materials, and overall design complexity. Their compact architecture enables seamless integration into joint‑level electronics while delivering the high accuracy required for precise torque control, essential for delicate collaborative manipulation, industrial pick‑and‑place performance, and safe interaction with humans.
Beyond accuracy and miniaturization, Current Sensor ICs also enhance safety, efficiency, and cost effectiveness. They provide fast, reliable galvanic isolation, enabling robots to instantly detect overloads, stalled actuators, or unexpected contact, capabilities that are mission‑critical for both industrial environments and next‑generation humanoids. Their low primary resistance reduces heat generation and boosts overall system efficiency, a major advantage for mobile robots and battery‑powered platforms.
Finally, Integrated Current Sensors support cost optimization by allowing OEMs to reuse proven architectures, decreasing development time and leveraging economies of scale across robotics and mobility applications.
The Future of Robotics
The robotics industry is advancing toward an era where sensing becomes the backbone of intelligent automation.
As humanoid robots transition from early prototypes to commercial deployment, manufacturers are moving toward automotive‑style vertical integration, designing entire platforms with standardized, automotive‑grade components. This shift elevates integrated current sensors as a default choice for safety, reliability, and manufacturability.
At the same time, the electronics within robots are becoming increasingly decentralized, with more sensing, drive electronics, and thermal monitoring embedded directly at the joint level. Compact and highly accurate current sensor ICs solutions will be essential to support this evolution, enabling precise torque control, local decision‑making, and greater autonomy at each actuator.

Looking ahead, sensing will also define safety and efficiency across all robot categories.
Robots operating near humans will require fault‑tolerant current measurement, redundancy, and exceptional torque precision to meet both regulatory requirements and user expectations. Energy efficiency will rise to the top of purchasing criteria, especially as power costs increase and sustainability becomes a priority. Low‑loss, high‑efficiency components like integrated current sensors will therefore play a central role in shaping the next generation of market‑leading robotic platforms.
Together, these trends position Current Sensor ICs not simply as a component, but as a strategic enabler of future robotics innovation.
Current Sensor ICs are Aligned with the Future of Robotics
Robotics is entering a new era of technological and commercial expansion. Industrial robots are becoming smarter and more efficient; collaborative robots are moving closer to human‑safe interaction; mobile robots are transforming logistics; and humanoids are emerging as the next frontier. Across all these segments, one need remains constant, precise, safe, and efficient current measurement.
LEM’s expanding integrated current sensors portfolio offers coverage across every robot family, from compact solutions for low‑payload systems to upcoming TMR-based solutions for high‑precision humanoid applications. With trends pointing toward miniaturization, safety, and vertical integration, the relevance of integrated current sensors will only increase and this sensor technology as powering the robots of tomorrow.